I det sidste årti eller mindre var alle bilproducenter, du mødte, begejstrede for udsigterne til, at selvkørende biler oversvømmede markedet. Mens nogle få store bilproducenter har lanceret 'ikke-helt-autonome' køretøjer, der kan køre selv ned ad motorvejen (med konstant overvågning fra chaufførerne, selvfølgelig), er den autonome teknologi ikke sket, som eksperter troede.
I 2019 var der globalt ca 31 millioner autonome køretøjer (en vis grad af autonomi) i operationer. Dette tal forventes at vokse til 54 millioner i år 2024. Tendenserne viser, at markedet kan vokse med 60 % på trods af et fald på 3 % i 2020.
Selvom der er mange grunde til, at selvkørende biler kunne lanceres meget senere end forventet, er en primær årsag manglen på kvalitetstræningsdata med hensyn til volumen, mangfoldighed og validering. Men hvorfor er træningsdata vigtige for udvikling af autonome køretøjer?
Betydningen af træningsdata for autonome køretøjer
Autonome køretøjer er mere datadrevne og dataafhængige end nogen anden anvendelse af AI. Kvaliteten af autonome køretøjssystemer afhænger i høj grad af typen, mængden og mangfoldigheden af de anvendte træningsdata.
For at sikre, at autonome køretøjer kan køre med begrænset eller ingen menneskelig interaktion, skal de forstå, genkende og interagere med realtidsstimuli på gaden. For at dette skal ske, er der flere neurale netværk skal interagere og behandle de indsamlede data fra sensorer for at levere sikker navigation.
Hvordan skaffes træningsdata til autonome køretøjer?
Et pålideligt AV-system trænes i alle mulige scenarier, et køretøj kan støde på i realtid. Den skal være forberedt på at genkende objekter og tage hensyn til miljøvariabler for at producere nøjagtig køretøjsadfærd. Men det er en udfordring at samle så store mængder af datasæt for at tackle hver kantsag præcist.
For at træne AV-systemet korrekt, bruges video- og billedannoteringsteknikker til at identificere og beskrive objekter i et billede. Træningsdata indsamles ved hjælp af kameragenererede billeder, der identificerer billederne ved at kategorisere og mærke dem nøjagtigt.
Annoterede billeder hjælper maskinlæringssystemer og computere med at lære, hvordan de udfører nødvendige opgaver. Kontekstuelle ting som signaler, vejskilte, fodgængere, vejrforhold, afstanden mellem køretøjer, dybde og andre relevante oplysninger er givet.
Flere førsteklasses virksomheder leverer træningsdatasæt i forskellige image og videoannotation formater, som udviklere kan bruge til at udvikle AI-modeller.
Hvor kommer træningsdataene fra?
Autonome køretøjer bruger en række sensorer og enheder til at indsamle, genkende og fortolke informationen omkring deres miljø. Forskellige data og annoteringer er nødvendige for at udvikle højtydende AV-systemer drevet af kunstig intelligens.
Nogle af de anvendte værktøjer er:
Kamera:
Kameraerne på køretøjet optager 3D- og 2D-billeder og videoer
radar:
Radar leverer afgørende data til køretøjet vedrørende objektsporing, detektion og bevægelsesforudsigelse. Det hjælper også med at opbygge en datarig repræsentation af det dynamiske miljø.
LiDaR (Lysdetektion og rækkevidde):
For nøjagtigt at fortolke 2D-billeder i et 3D-rum er det vigtigt at bruge LiDAR. LiDAR hjælper med at måle dybde og afstand og nærhedsføling ved hjælp af laser.
Peg på note under indsamling af autonome køretøjstræningsdata
Træning af et selvkørende køretøj er ikke en enkeltstående opgave. Det kræver løbende forbedringer. Et fuldt autonomt køretøj kan være et mere sikkert alternativ til førerløse biler, der har brug for menneskelig assistance. Men til dette skal systemet trænes på store mængder forskelligartede og træningsdata af høj kvalitet.
Volumen og mangfoldighed
Et bedre og mere pålideligt system kan udvikles, når du træner din machine learning model på store mængder forskellige datasæt. En datastrategi på plads, der nøjagtigt kan identificere, hvornår et datasæt er tilstrækkeligt, og hvornår der kræves erfaring fra den virkelige verden.
Visse aspekter af kørsel kommer kun fra den virkelige verden. For eksempel bør et selvkørende køretøj forudse afvigende scenarier i den virkelige verden, såsom at dreje uden at signalere eller støde på en fodgænger, der jaywalker.
Mens høj kvalitet dataarnnotering hjælper i høj grad, anbefales det også at indhente data i form af volumen og mangfoldighed i løbet af uddannelse og erfaring.
Høj nøjagtighed i annotering
Dine maskinlærings- og deep learning-modeller skal trænes på rene og nøjagtige data. Autonom kører biler bliver mere pålidelige og registrerer høje niveauer af nøjagtighed, men de skal stadig flyttes fra 95 % nøjagtighed til 99 %. For at gøre det skal de opfatte vejen bedre og forstå de usædvanlige regler for menneskelig adfærd.
Brug af kvalitetsdataannoteringsteknikker kan hjælpe med at forbedre nøjagtigheden af maskinlæringsmodellen.
- Start med at identificere huller og uligheder i informationsstrømmen, og hold datamærkningskravene opdateret.
- Udvikle strategier til at imødegå de virkelige scenarier.
- Forbedre regelmæssigt modellen og kvalitetsbenchmarks for at afspejle de seneste træningsmål.
- Altid samarbejde med en pålidelig og erfaren datatræningspartner, der bruger den nyeste mærkning og annotationsteknikker og bedste praksis.
Mulige anvendelsestilfælde
Objektdetektion og sporing
Adskillige annoteringsteknikker bruges til at annotere objekter såsom fodgængere, biler, vejsignaler og mere i et billede. Det hjælper autonome køretøjer med at opdage og spore ting med større nøjagtighed.
Registrering af nummerplader
 Ved hjælp af billedanmærkningsteknikken til afgrænsningsrammen kan nummerplader nemt lokaliseres og udtrækkes fra billeder af køretøjer.
Ved hjælp af billedanmærkningsteknikken til afgrænsningsrammen kan nummerplader nemt lokaliseres og udtrækkes fra billeder af køretøjer.Analyse af semafor
Igen, ved hjælp af afgrænsningsboksteknikken er signaler og skilte let at identificere og kommentere.
Sporingssystem til fodgængere
Fodgængersporing udføres ved at spore og kommentere fodgængerens bevægelse i hver videoramme, så det autonome køretøj nøjagtigt kan lokalisere fodgængeres bevægelse.
Banedifferentiering
Banedifferentiering spiller en afgørende rolle i udviklingen af autonome køretøjssystemer. I autonome køretøjer tegnes linjer over baner, gader og fortove ved hjælp af polyline-annotering for at muliggøre nøjagtig vognbanedifferentiering.
ADAS systemer
Avancerede førerassistentsystemer hjælper selvkørende køretøjer med at registrere vejskilte, fodgængere, andre biler, parkeringshjælp og kollisionsadvarsel. For at aktivere computersyn in ADAS, skal alle vejskilte billeder være kommenteret effektivt for at genkende objekter og scenarier og træffe rettidig handling.
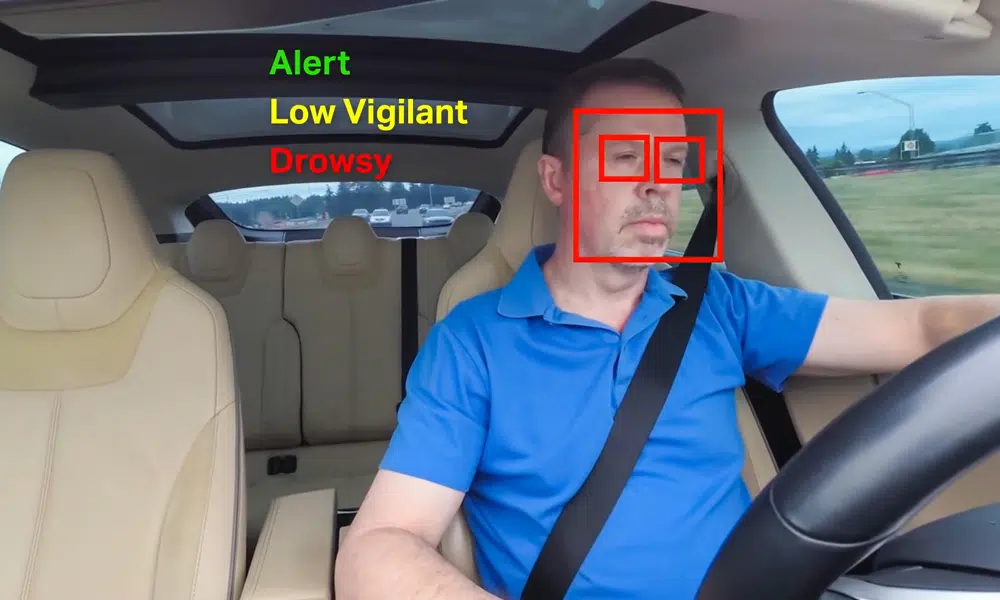
Førerovervågningssystem / Overvågning i kabinen
Overvågning i kabinen hjælper også med at sikre sikkerheden for passagererne i køretøjet og andre. Et kamera placeret inde i kabinen indsamler vital information om føreren såsom døsighed, øjenblik, distraktion, følelser og meget mere. Disse billeder i kabinen er præcist kommenterede og bruges til træning af maskinlæringsmodellerne.
 Ved hjælp af billedanmærkningsteknikken til afgrænsningsrammen kan nummerplader nemt lokaliseres og udtrækkes fra billeder af køretøjer.
Ved hjælp af billedanmærkningsteknikken til afgrænsningsrammen kan nummerplader nemt lokaliseres og udtrækkes fra billeder af køretøjer.Shaip er en førende dataannoteringsvirksomhed, der spiller en afgørende rolle i at forsyne virksomheder med træningsdata af høj kvalitet til at drive autonome køretøjssystemer. Vores billedmærkning og annoteringsnøjagtighed har hjulpet med at bygge førende AI-produkter i forskellige industrisegmenter, såsom sundhedspleje, detailhandel og bilindustrien.
Vi leverer store mængder af forskellige træningsdatasæt til alle dine maskinlærings- og deep learning-modeller til konkurrencedygtige priser.
Gør dig klar til at transformere dine AI-projekter med en pålidelig og erfaren udbyder af træningsdata.